
티스토리 뷰
인공지능을 위한 선형대수 - CHAPTER 3.4 Orthogonal Projection 1
developer0hye 2020. 12. 8. 00:27www.edwith.org/linearalgebra4ai/lecture/24796/
[LECTURE] Orthogonal Projection Ⅰ : edwith
학습목표 이번에는 Orthogonal Projection 관점에서 Least Squares Problem을 접근해보도록 하겠습니다. 이를 위해 선형대수에서 중요한 개념인 Ortho... - 커넥트재단
www.edwith.org
Orthogonal Projection Perspective
Projection은 "사영을 시킨다."라는 의미로 해석 가능합니다.
\(A\mathbf{x}=\mathbf{b}\)인 Linear System에 대하여, Least Square 방법을 통해 구한 해 \(\hat{\mathbf{x}}\)는 다음과 같습니다.
\(\hat{\mathbf{x}}=(A^{T}A)^{-1}A^{T}\mathbf{b}\)
이렇게 구한 \(\hat{\mathbf{x}}\)를 \(A\mathbf{x}=\mathbf{b}\)의 \(\mathbf{x}\)에 대입하면,
\(A\hat{\mathbf{x}}=\hat{\mathbf{b}}\) 가 됩니다. 여기서, \(\hat{\mathbf{b}}\)는 \(\mathbf{b}\)를 \(A\)의 Column Space에 정사영 내린 벡터와 동일합니다.
그리고, \(\hat{\mathbf{b}}\)은 다음과 같습니다.
\(\hat{\mathbf{b}}=A\hat{\mathbf{x}}=A(A^{T}A)^{-1}A^{T}\mathbf{b}\)
Orthogonal Sets and Orthonormal Sets
Orthogonal Sets
Definition: A set of vectors {\( \mathbf{u}_{1}, \ldots ,\mathbf{u}_{p}\)} in \(\mathbb{R}^{n}\) is an orthogonal set if each pair of distinct vectors from the set is orthogonal
That is, if \(\mathbf{u}_{i} \cdot \mathbf{u}_{j} = 0\) whenever \( i \ne j\).
각각의 벡터들이 서로 수직인 집합.
Orthonormal Sets
Definition: A set of vectors {\( \mathbf{u}_{1}, \ldots ,\mathbf{u}_{p}\)} in \(\mathbb{R}^{n}\) is an orthonormal set if it is an orthogonal set of unit vectors.
각각의 벡터들이 서로 수직이면서 Norm값이 1인 벡터들의 집합.
Is an orthogonal (or orthonormal) set also a linearly independent set? Yes.
What about its converse? No.
Orthogonal Basis and Orthonormal Basis
Consider basis {\( \mathbf{v}_{1}, \ldots ,\mathbf{v}_{p}\)} of a p-dimensional subsapce \(W\) in \(\mathbb{R}^{n}\).
Can we make it as an orthogonal (or orthonormal) basis?
Yes, it can be done by Gram-Schmidt process -> QR factorization(나중에 배움)
Given the orthogonal basis {\( \mathbf{v}_{1}, \ldots ,\mathbf{v}_{p}\)} of \(W\),
let's compute the orthogonal projection of \(\mathbf{y} \in \mathbb{R}^{n}\) onto \(W\).
어떠한 basis가 주어졌을때, basis를 이루는 벡터들간의 관계를 Orthogonal하도록 바꾸어줄수 있습니다. 이러한 기법으로 Gram-Schmidt process가 있습니다.
Orthogonal Projection \(\hat{\mathbf{y}}\) of \(\mathbf{y}\) onto Line
Consider the orthogonal projection \(\hat{\mathbf{y}}\) of \(\mathbf{y}\) onto one-dimensional subspace \(L\). 여기서 \(L\)은 벡터 \(\mathbf{u}\)의 Span입니다.
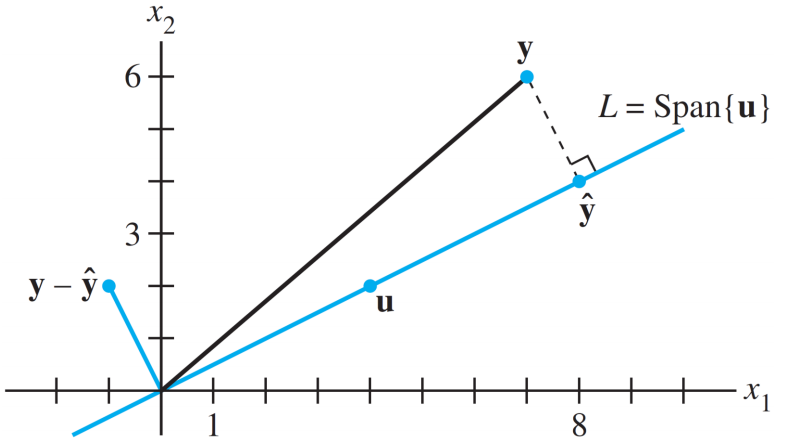
\(\mathbf{y}\)와 \(\mathbf{u}\)가 이루는 각도를 \(\theta\)라고 하겠습니다.

직각 삼각형이 보입니다.
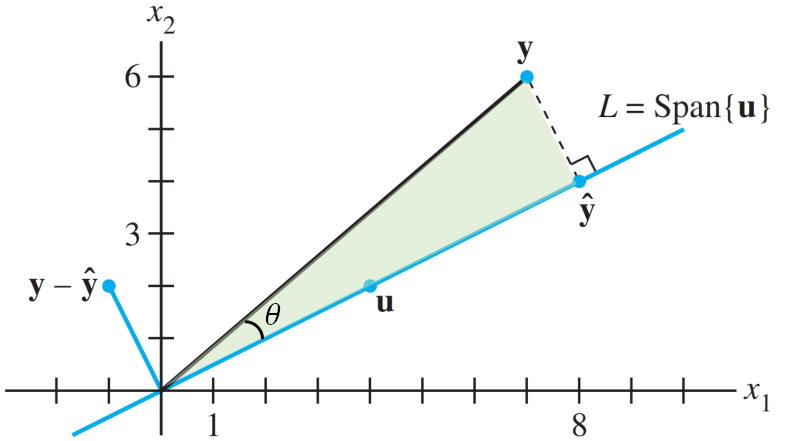
먼저, \(\hat{\mathbf{y}}\)의 길이를 구해보도록 하겠습니다. 여기서, 갑자기 여기서 \(\hat{\mathbf{y}}\)의 길이를 구한다고? 라고 당황할 수 있지만 따라가봅시다.

중고등학교때 배운 직각 삼각형의 변의 길이 공식을 떠올려봅시다.
\(\hat{\mathbf{y}}\) 의 길이 = \( ||\mathbf{y}||\cos \theta \) 입니다.
지난 강의를 통해 두 벡터 \(\mathbf{y}\)와 \(\mathbf{u}\)의 내적은 \(\mathbf{y} \cdot \mathbf{u} = ||\mathbf{y}|| ||\mathbf{u}|| \cos \theta \)라는 것을 알고있습니다. 여기서, \(\hat{\mathbf{y}}\) 의 길이 = \( ||\mathbf{y}||\cos \theta = \frac{\mathbf{y} \cdot \mathbf{u}}{||\mathbf{u}||} \)라는 것을 알 수 있습니다. 여기서 잠깐 쉬어줍시다.
\(\mathbf{u}\)와 \(\hat{\mathbf{y}}\)을 유심히 들여다 보면 서로 길이는 다르지만 방향이 같다는 것을 알 수 있습니다.
즉, \(\mathbf{u}\)에 적절한 스칼라값을 곱하여 \(\hat{\mathbf{y}}\)을 구할 수 있습니다.
다음은 적절한 스칼라값을 구하는 과정입니다.
먼저, \(\mathbf{u}\) 를 \(||\mathbf{u}||\)로 나누면 단위벡터가 됩니다. 그다음, \(||\hat{\mathbf{y}}||\)을 곱하면 \(\hat{\mathbf{y}}\)가 됩니다.
이를 수식으로 나타내면 다음과 같습니다.
\(\hat{\mathbf{y}} = \frac{ ||\hat{\mathbf{y}}|| }{||\mathbf{u}||} \mathbf{u} = \frac{ \mathbf{y} \cdot \mathbf{u} }{\mathbf{u} \cdot \mathbf{u}} \mathbf{u} \)
적절한 스칼라값은 \(\frac{ ||\hat{\mathbf{y}}|| }{||\mathbf{u}||}\)입니다.
수식으로 정리하면,
\(\hat{\mathbf{y}} = \mathsf{proj}_{L}\mathbf{y} = \frac{ \mathbf{y} \cdot \mathbf{u} }{\mathbf{u} \cdot \mathbf{u}} \mathbf{u} \) 입니다.
여기서 \(\mathbf{u}\)가 단위 벡터인 경우 \( \hat{\mathbf{y}} = \mathsf{proj}_{L}\mathbf{y} = (\mathbf{y} \cdot \mathbf{u}) \cdot \mathbf{u} \) 입니다.
Orthogonal Projection \(\hat{\mathbf{y}}\) of \(\mathbf{y}\) onto Plane
우리는 임의의 벡터를 Line이 아닌 2차원, 3차원, 4차원 이상의 Subspace에 사영을 내리는 경우도 생각할 수 있습니다.
임의의 벡터 \(\mathbf{y}\)를 2차원 평면 Subspace \(W = \mathsf{Span}\{\mathbf{u}_{1}, \mathbf{u}_{2}\}\)에 사영 내리고 사영된 벡터 \(\hat{\mathbf{y}}\)를 구해보겠습니다.

\(\hat{\mathbf{y}}\)는 \(\mathbf{y}\)를 \(\mathbf{u}_{1}\)에 정사영내린 벡터와 \(\mathbf{u}_{2}\)에 정사영내린 벡터를 더한 벡터와 동일합니다. 단, \(\mathbf{u}_{1}\)과 \(\mathbf{u}_{2}\)는 Orthogonal 해야합니다.
'Math > Linear Algebra' 카테고리의 다른 글
| 인공지능을 위한 선형대수 - CHAPTER 3.6 그람-슈미트 직교화와 QR 분해 (0) | 2021.01.10 |
|---|---|
| 인공지능을 위한 선형대수 - CHAPTER 3.5 Orthogonal Projection 2 (0) | 2020.12.27 |
| 인공지능을 위한 선형대수 - CHAPTER 3.3 정규방정식 (0) | 2020.11.14 |
| 인공지능을 위한 선형대수 - CHAPTER 3.2 Least Squares와 그 기하학적 의미 (0) | 2020.11.05 |
| 인공지능을 위한 선형대수 - CHAPTER 3.1 Least Squares Problem 소개 (0) | 2020.10.24 |
- Total
- Today
- Yesterday
- PyCharm
- 인공지능을 위한 선형대수
- 위상 정렬 알고리즘
- LCA
- 파이참
- ㅂ
- cosine
- 백준 1766
- 백준 11437
- 자료구조
- 문제집
- 순열
- 백준
- 가장 긴 증가하는 부분 수열
- 단축키
- MOT
- 백트래킹
- C++ Deploy
- 조합
- Lowest Common Ancestor
- 백준 11053
- 이분탐색
- FairMOT
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 | 31 |